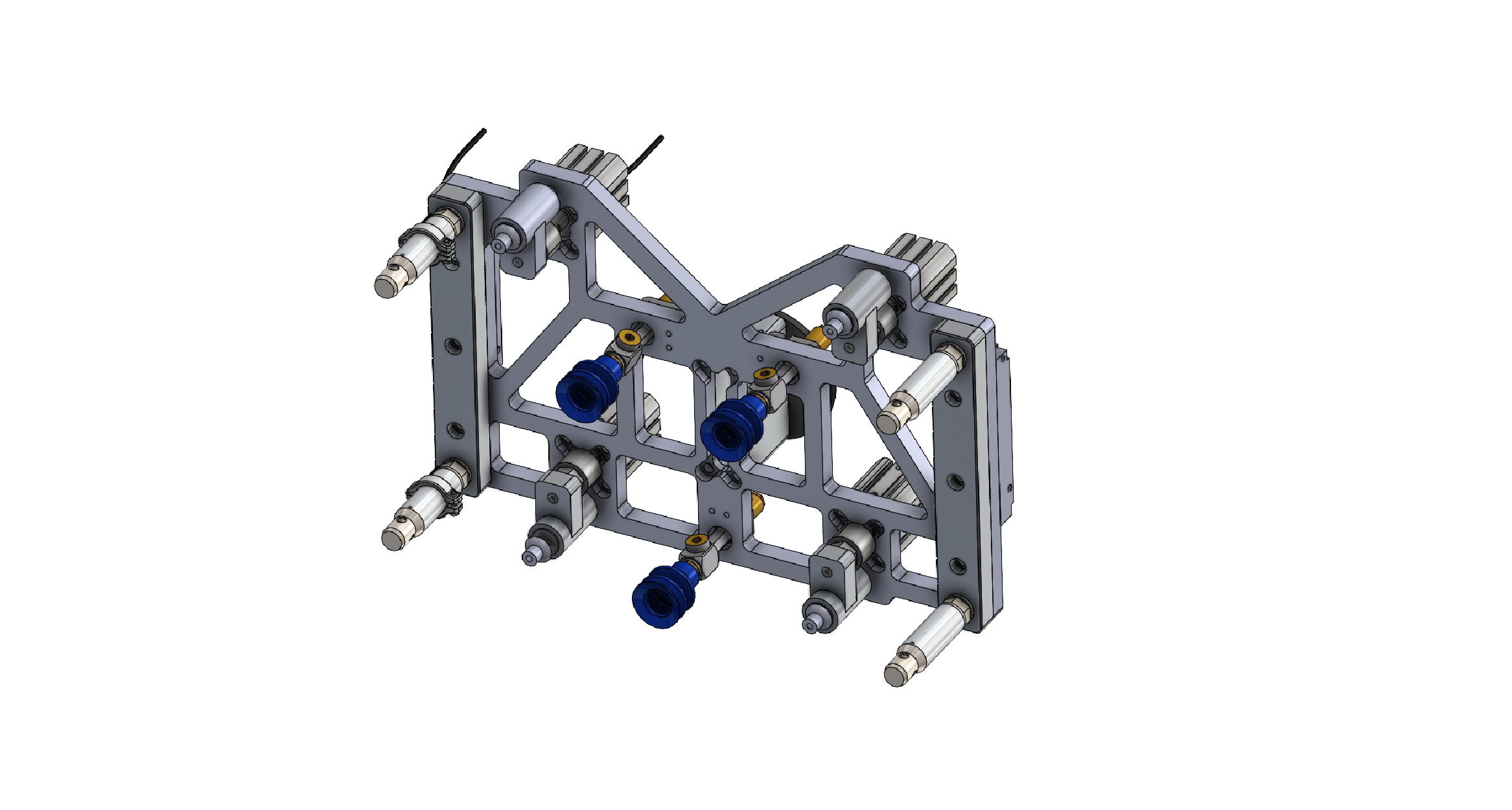
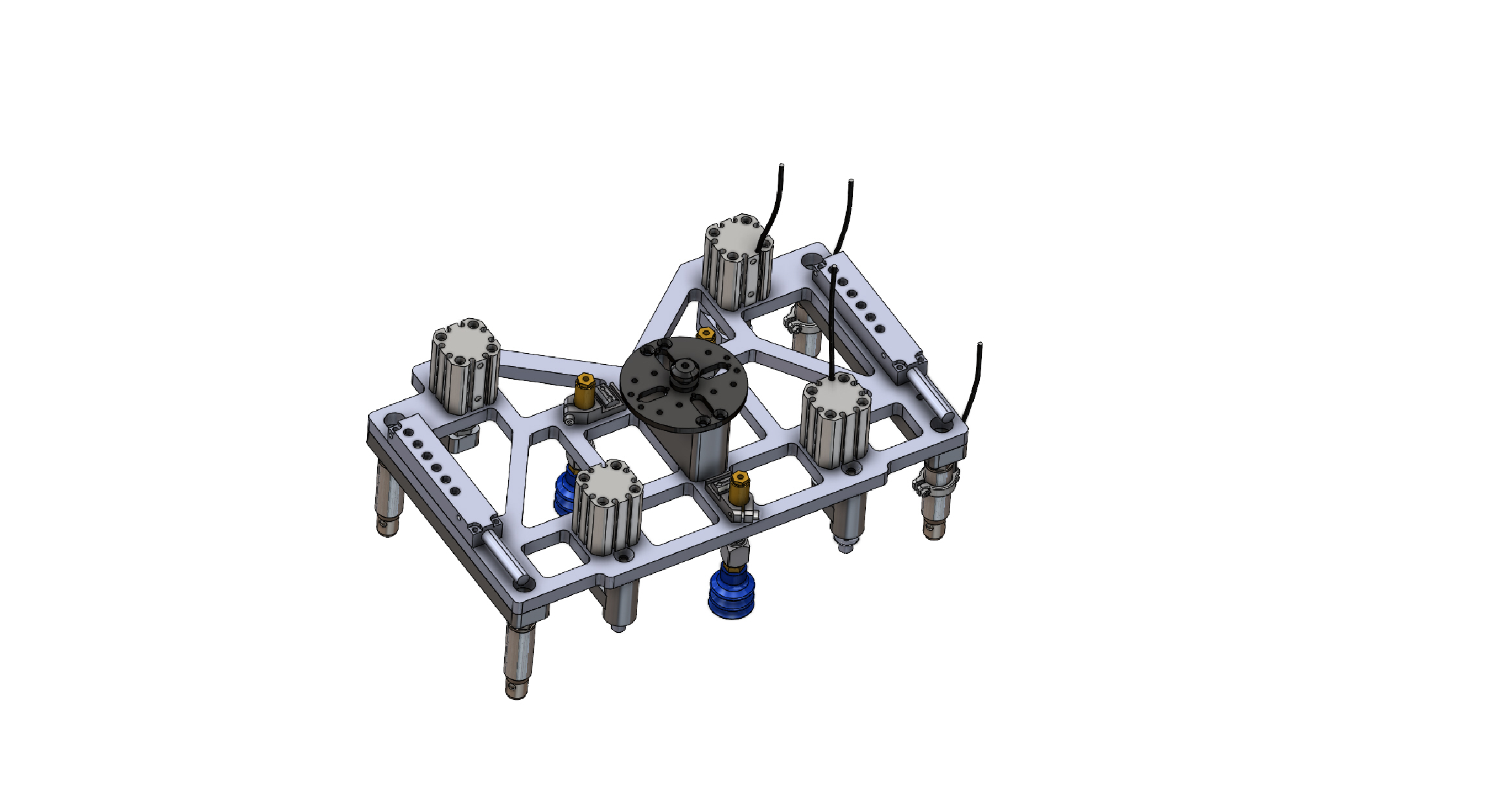
Automation with EOAT – Pushup of rubber pads to finish plastic POD
Posted by
On November 27, 2021
And another special End of Arm robot gripper designed for specific costumer needs.
Griper hand is working in cycle with automation dozer for rubber pads. We collect rubber pads in our EOAT, with help of centring lock docking fingers ZTE 20 V produced by Ass Maschinenbau company from Germany, as we lock to mould with build in centring connector, we align the EOAT within 0,03mm reference with plain of mould. This allowes precice reference so we can push on the rubber pads directly to IBM parts. Once this cycle is finished we unlock finger dock and collect finish part with vacuum cups to exit the mould and place finished parts to transport conveyor for further production process.